
[지디넷코리아]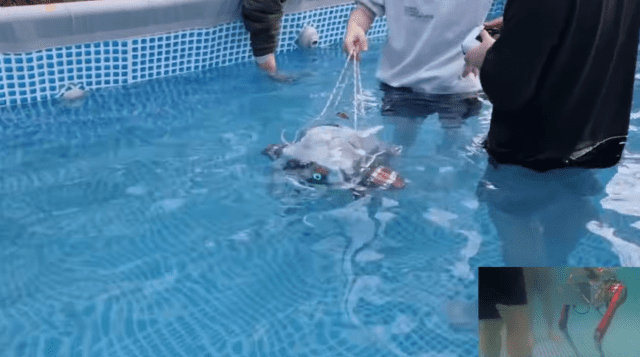
물 속에서 두 발로 걷는 로봇이 국내 연구진 손에서 탄생했다.
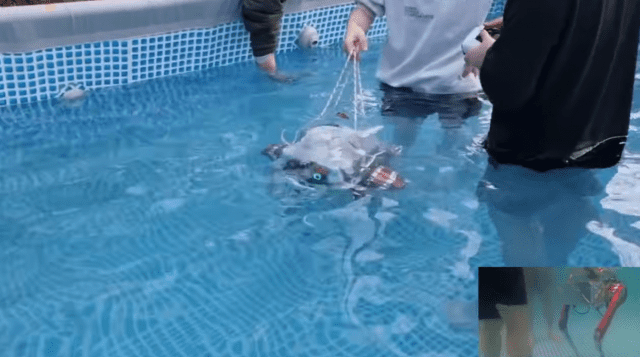
국민대학교 기계공학부 조백규 교수 연구실(RcLab)은 자체 개발한 이족보행 로봇 ‘루비(RUBI)’의 수중 보행시험 영상을 공개했다.
약 3분가량 이어진 영상에는 루비가 수심 약 1m 수심에서 균형을 잃지 않고 천천히 발을 내딛는 모습이 담겼다. 지상에서 걷는 로봇에 물을 뿌리는 실험도 진행했다. 로봇은 물을 맞으면서도 균형을 잃지 않고 보행을 계속 이어나갔다.
루비는 지난 8월 개발된 6자유도 이족 로봇이다. 높이 약 75cm, 무게 28kg 크기다. 외장 알루미늄 재질에 방수 성능을 갖췄다. 복잡한 관절 구조를 갖는 휴머노이드와 달리, 수중 환경에서 안정적인 보행 패턴을 만들기 위해 6자유도 단순화된 구조를 택했다.
연구진은 루비를 최고 방진·방수 등급(IP68)을 목표로 인증을 받을 계획이다. 조백규 교수는 “비슷한 설계의 ‘퐁봇-R’이 IP67 인증을 받았고, 루비가 실제 물속 테스트가 진행된 만큼 IP68 획득에 무리가 없을 것”이라고 설명했다.
국민대 RcLab은 그간 사족, 휠-레그 하이브리드 등 다양한 로봇을 개발해 왔다. 최근 공개된 휴머노이드 ‘로크-4’를 통해 지상용 휴머노이드의 새로운 하드웨어 구조를 제시한 데 이어, 루비는 그 연구 스펙트럼을 수중으로 확장한 사례로 평가된다.
조백규 교수는 “루비가 물 분사 환경과 완전 수중 환경에서 동적 보행을 수행하는 성능을 보여줬다”며 “로봇 방수 설계와 안정적인 보행 제어, 복잡한 유체력 대응하는 능력을 입증한다”고 말했다.